2022.07.01
最新の制御理論を応用したロケットの姿勢制御器の設計
研究論文助成事業 採択年度: 2022
坂岡恵美
モデル予測制御による宇宙飛翔体の姿勢制御系設計
掲載誌: 計測自動制御学会論文集 発行年: 2022
DOI: https://doi.org/10.9746/sicetr.58.168
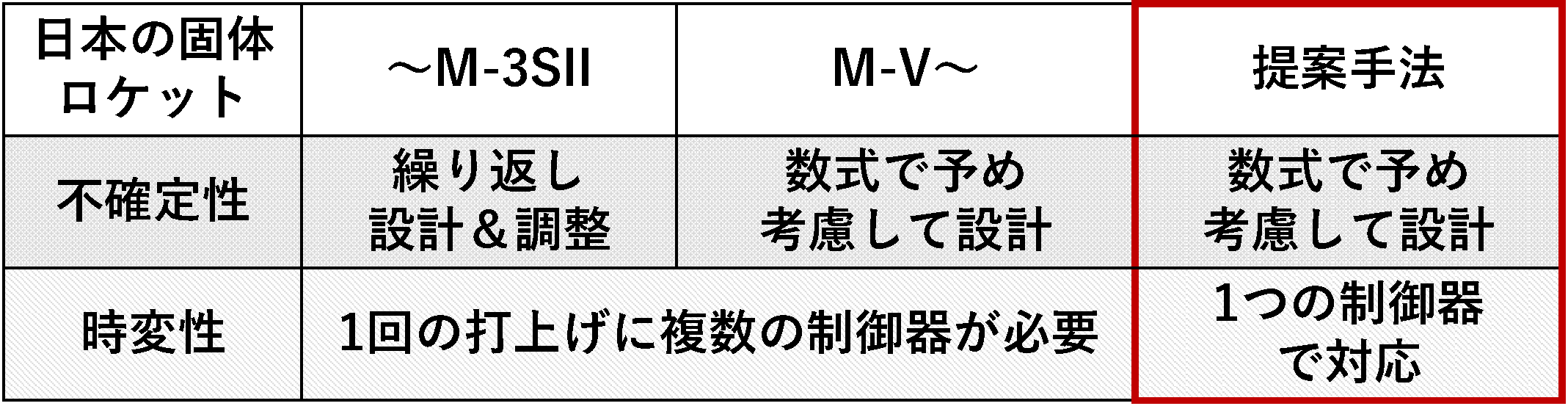
状態が正確にわからないこと(不確定性)に対してはアプローチがとられることで発展してきました。今回の研究はもう一つの特徴である、状態が時間とともに大きく変化すること(時変性)に対してアプローチをとるものです。
ロケットの姿勢を制御するとき、ロケットがどのような状態になっているのかを把握することが非常に重要です。しかし、ロケットの状態はおおよその値としてわかっていても、正確には把握することができず(不確定性)、また、時間とともに大きく変化します(時変性)。
現在の方法では、時変性に対応するため、ロケットの飛翔時間を複数のブロックに区切ってそのブロックの数だけ制御器が必要です。この方法では、1回の打上げに対して複数個の制御器が必要となるため、今後ロケットの打上げ頻度を上げたいという需要が出てきたときに課題となります。
この課題を解決するため、制御対象の変化に積極的に対応可能な理論を適用することを本研究では提案しました。最終的には、この理論と不確定性に対応可能な理論を組み合わせることを目指しています。本研究では、2つの理論を基にした新たな理論の構築に向け、シミュレーションを行い、提案手法が有用である可能性を示しました。
この研究が完成すると、ロケットの姿勢制御器に必要な時間や手間が低減されるため、高頻度の打上げに貢献が可能です。また、現在開発が進む再使用ロケットにも応用が見込まれます。
書誌情報
- タイトル:モデル予測制御による宇宙飛翔体の姿勢制御系設計
- 著者:坂岡恵美
- 掲載誌:計測自動制御学会論文集58巻3号
- 掲載年:2022
- DOI:https://doi.org/10.9746/sicetr.58.168
物理科学研究科 宇宙科学専攻 坂岡恵美